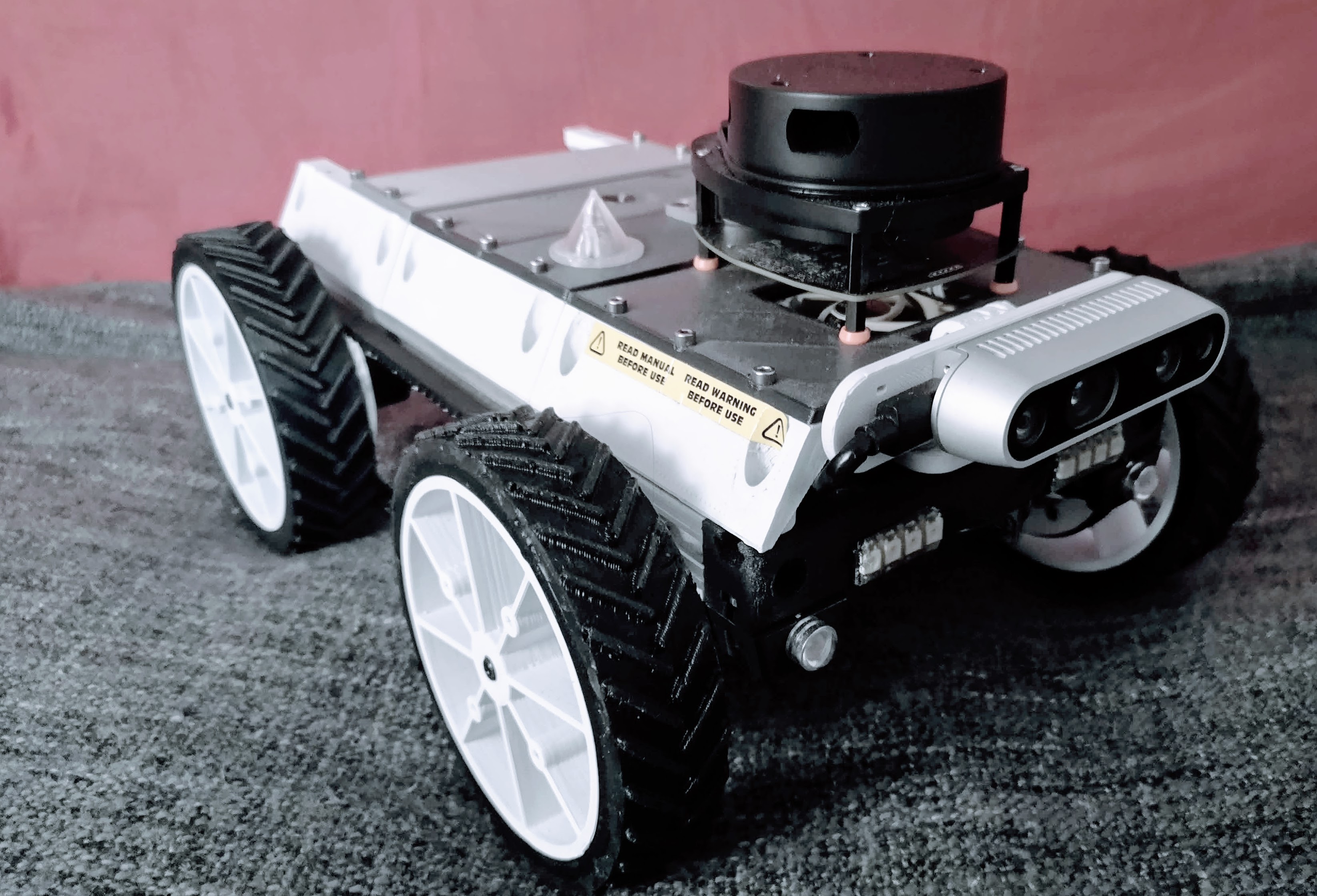
A Rover robot built as a learning platform for robotics and based upon several opensource technologies like ROS.
It is also used as the development platform for the uNAV2 project, an advanced opensource motor control system for robots.
The robot employs several sensors (3D camera, Lidar & IMU) to sense the surrounding environment, build a map and navigate through it autonomously (SLAM, Simultaneous Localization And Mapping) avoiding obstacles and blockages.
A Rover robot built as a learning platform for robotics and based upon several opensource technologies like ROS.
It is also used as the development platform for the uNAV2 project, an advanced opensource motor control system for robots.
The robot employs several sensors (3D camera, Lidar & IMU) to sense the surrounding environment, build a map and navigate through it autonomously (SLAM, Simultaneous Localization And Mapping) avoiding obstacles and blockages.
Find additional Slammer related blog entries here