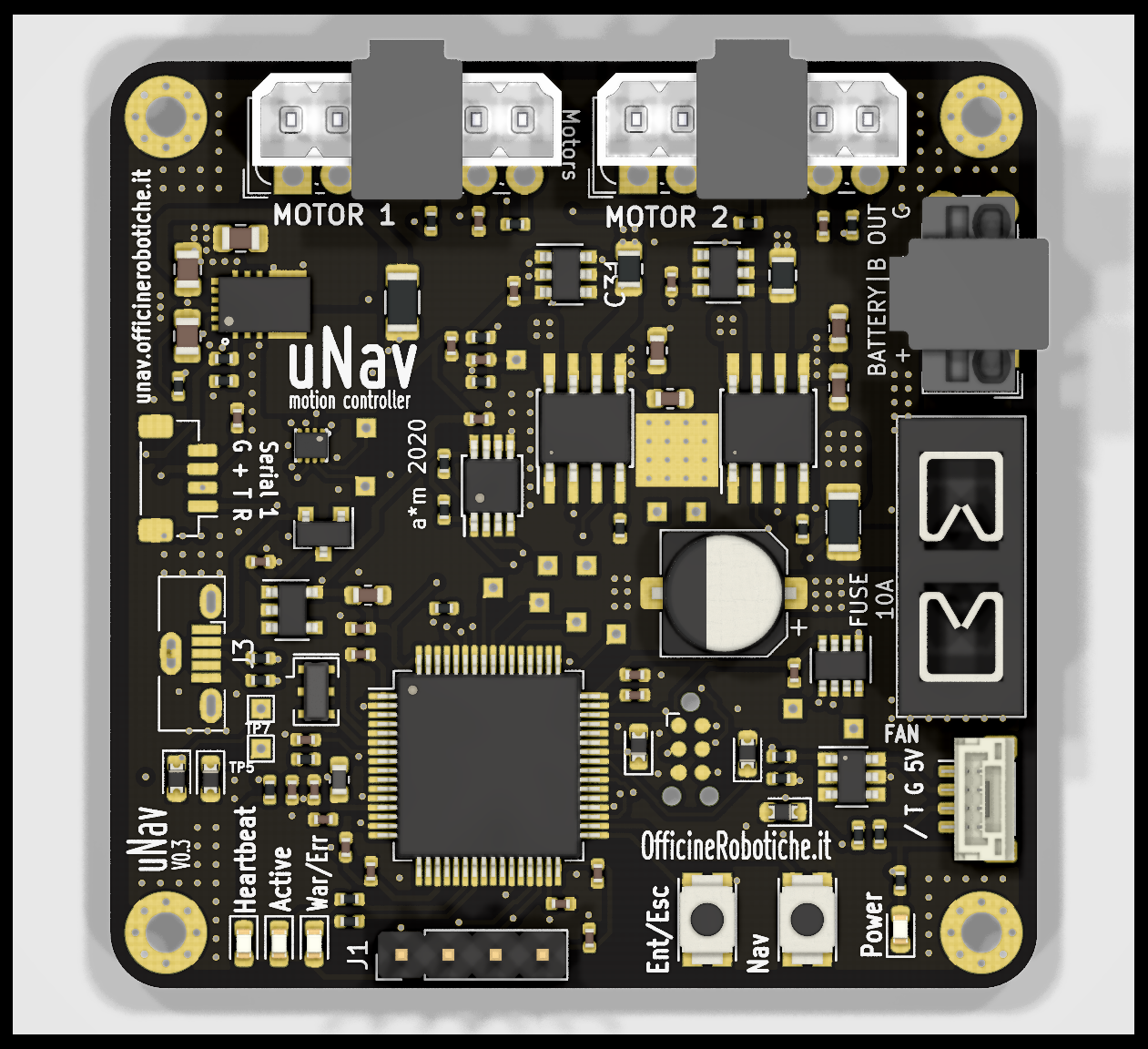
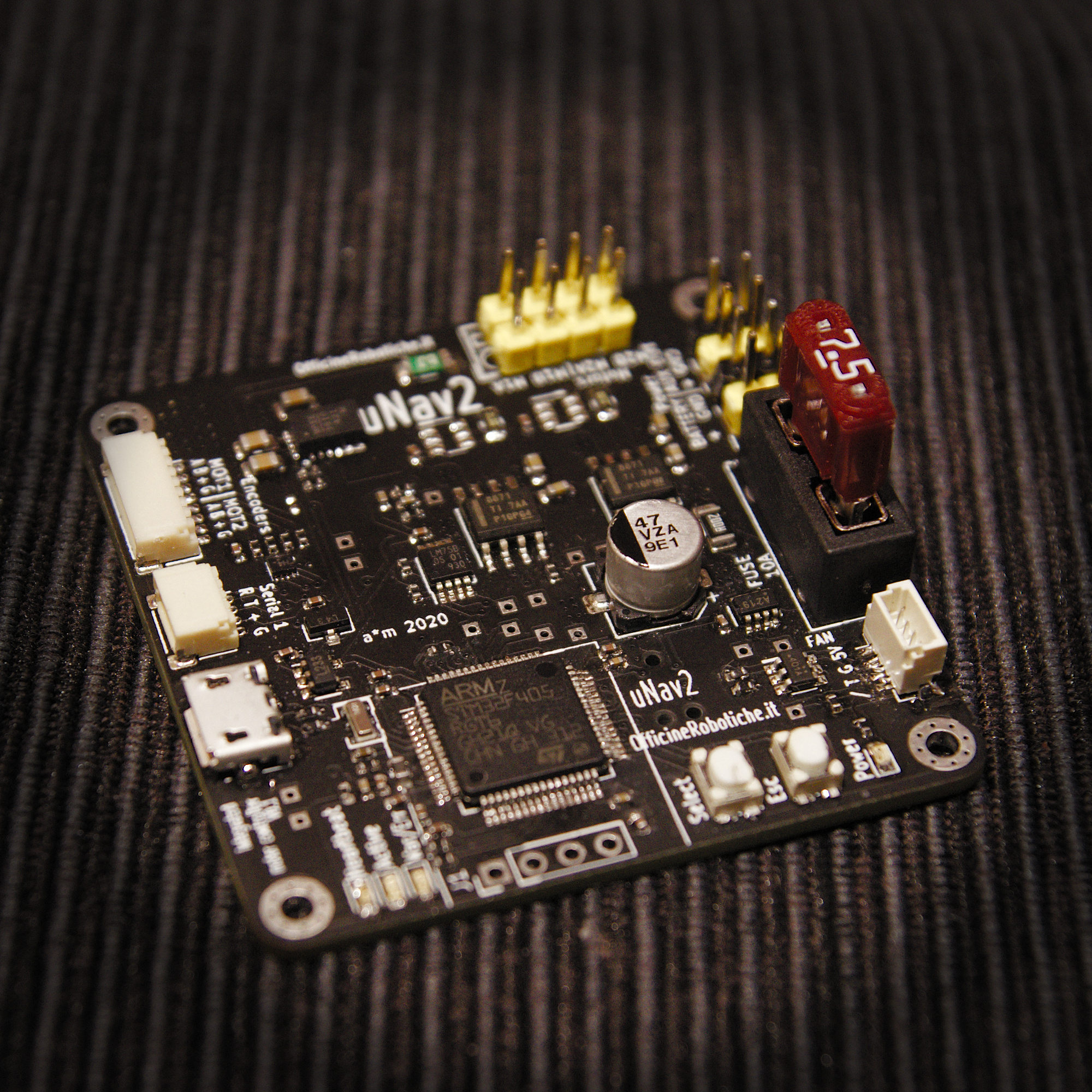
uNav2 was born as a STM32 based redesign of uNav (based on PIC32). It is a motor controller board that integrates with ROS. it is currently used to “move” Slammer.
This board includes a STM32F405 and two DRV8871 drivers. It supports motor current feedback using two INA186 and global battery current/voltage monitor using an INA219. Additionally there is an LM75 temperature monitor ic, a fan output and switching supply for 5V to power the board and the motor encoders.
References
HW repository, there are a few issues (i’m adding them to the GitHub project to keep track of all changes needed)
Interactive BOM (built with the awesome InteractiveHtmlBom plugin)